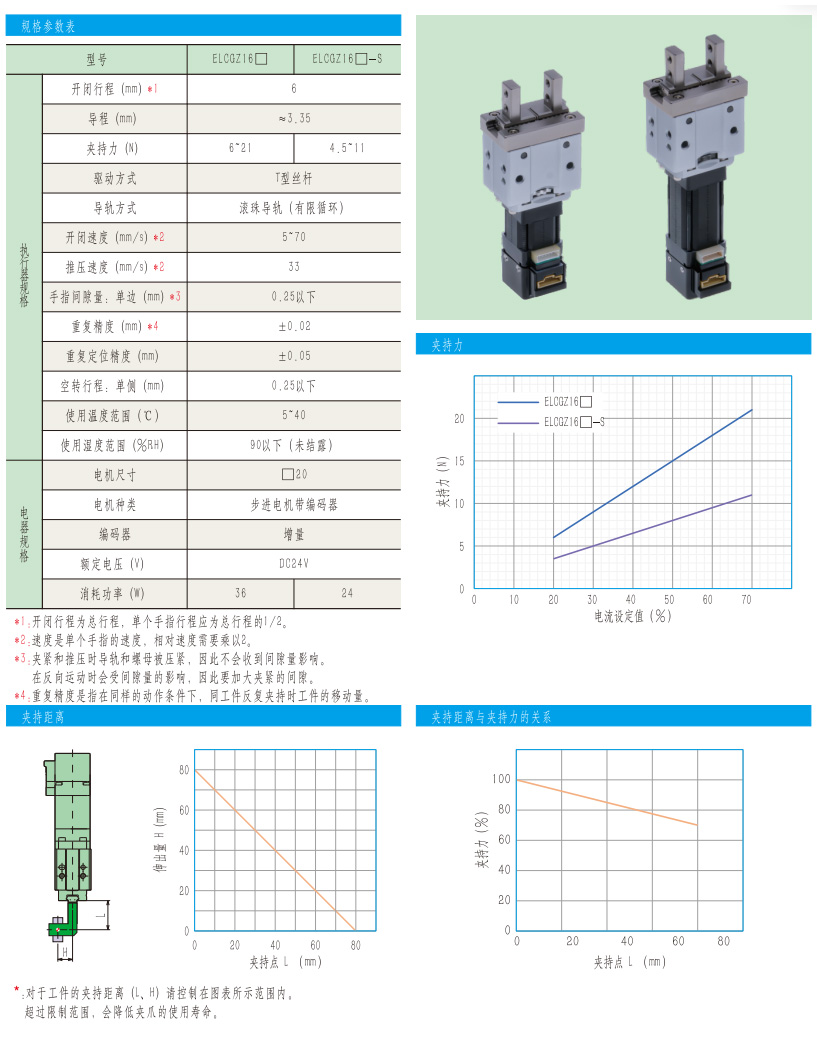
ELCGZ16

- Nominal size(mm):
- 16mm
- Product Overview
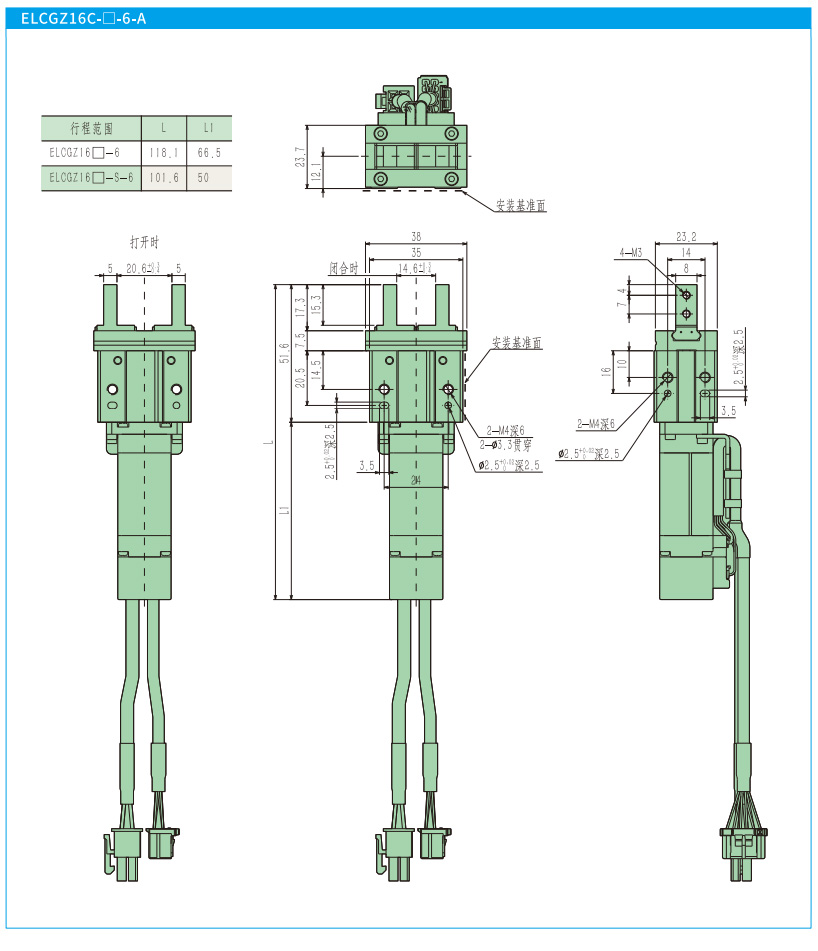
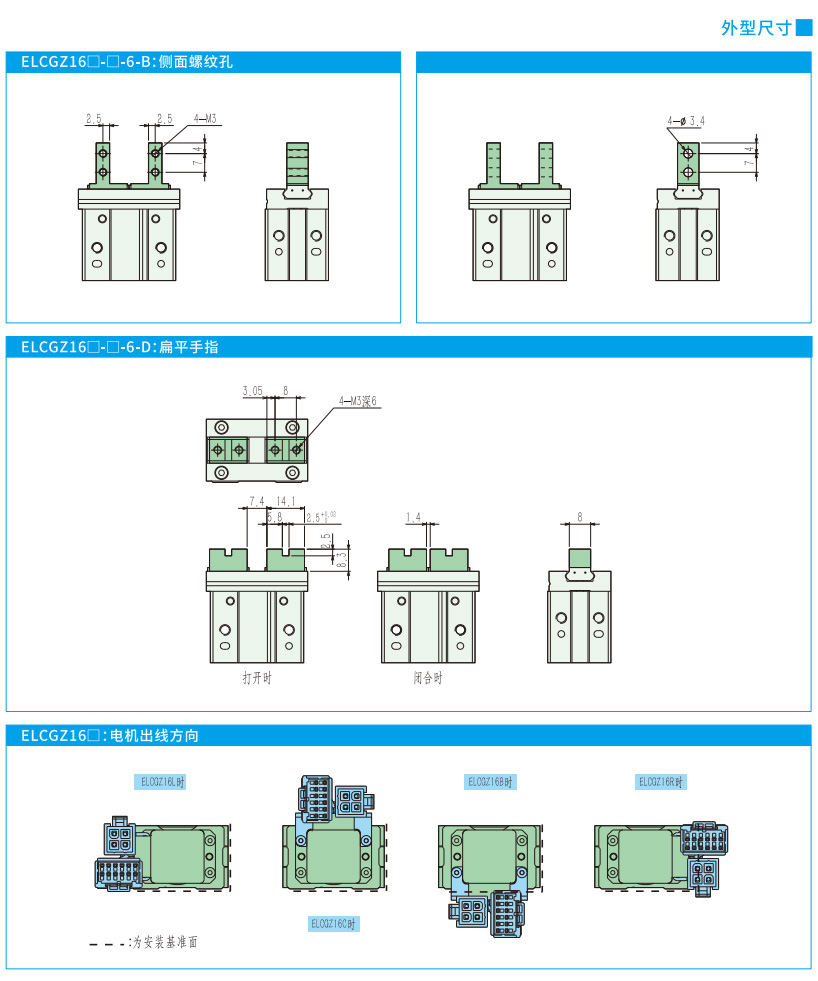
- Model Specification
- Product File Download
The electric gripper is a special type of gripper with a longer arm, enabling it to grasp objects. When the robot works at a fixed point, the electric gripper can effectively extend its working range with its longer arm.
Notes:
1. When installing the electric claw, please use screws of an appropriate length and tighten them within the MAX tightening torque. Exceeding the MAX tightening torque value may cause poor operation of the electric claw, while insufficient tightening may lead to claw displacement or falling off. Please be careful!
2. Please use a pushing action when clamping the workpiece.
3. Please use the clamping point within the specified range. Exceeding the limit will cause the clamping jaw to bear excessive torque load, which will reduce its service life.
4. When confirming the clamping force, please select a model with a certain margin.
5. When selecting a model, please choose one with a margin for the workpiece width. In situations without a margin, the electric claw may cause unstable clamping due to deviations in the opening and closing width and the size of the workpiece.
6. When the electric claw opens and closes and moves, ensure that it does not collide with external workpieces. The fingers during the opening and closing action must not be subjected to lateral loads or impact loads to prevent loosening or breakage of the fingers. Poor action may be caused by the thread engagement of the feed screw.
7. The electric claw cannot be used in situations where there is excessive external force (including vibration) and impact force. Excessive external force and impact force can cause poor operation of the electric claw. Please be careful!
8. To remove the workpiece when the power is off, please use the manual dial wheel for opening and closing. When operating with the manual dial wheel, please confirm the position of the manual dial wheel of the electric claw first to ensure sufficient operating space. Additionally, please do not apply excessive torque to the manual dial wheel to avoid damage or malfunction. When the electric claw reaches the end of its travel, the workpiece and accessories should not touch other objects and should have a gap.
9. Regarding homing: The homing direction should be the same as the workpiece clamping direction. When the homing direction is reversed, displacement deviations may occur due to the amount of clearance.
10. Position setting during the clamping action:
①Please ensure that there is a gap of at least 0.5mm between the starting position of the clamping and the workpiece being clamped. If the setting is set to the same width as the workpiece, the clamping action (pushing mode) may trigger an alarm. Please be aware of this!
②The set clamping distance should be less than the width of the workpiece. If the setting is the same width as the workpiece, it may cause the workpiece to fall off. The situation is opposite for internal support. Please pay attention!
11. When clamping a workpiece, do not concentrate the load on one finger.
12. When installing the fixture on the finger, do not apply excessive torque to the finger. Excessive torque can reduce the accuracy of the finger assembly.
13. When releasing the clamping, increase the operating torque as required. If the release torque is too low, the clamping may sometimes fail to be released.